The CCS-C code for the PIC 16F690 (but also see § at bottom of page)
(I have yet to understand the tris lines - they seem to be ignored)
#include <16F690.h>
#use delay(clock=4000000)
#fuses NOWDT, HS, PUT, NOPROTECT, BROWNOUT, MCLR, NOCPD
//------------------------PICi2cSlave.c--------------------------------
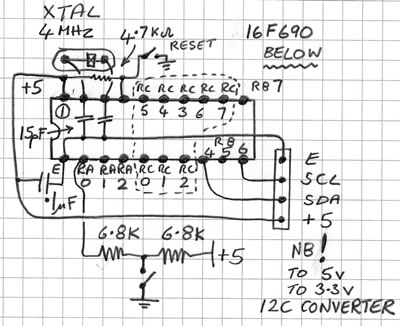
#use i2c(SLAVE, SDA=PIN_B4, SCL=PIN_B6, address=0xA0, FORCE_HW) // I2C by Hardware
//--------------------------------------------------------------------
// PORTB.4 [RB4 pin13] -> I2C SDA (I2C Serial Data)
// PORTB.6 [RB6 pin10] -> I2C SCL (I2C Serial Clock)
// defined address 0xA0 becomes 0x50 (decimal 80) on the Slug driver
// - linux puts a 0 before the i2c address and removes one at the end
//--------------------------------------------------------------------
BYTE incoming, state; // I2C vars
BYTE address ; // Address
INT16 buffer[0x10]; //Array of Int16s
INT16 DelayUsec1 , DelayUsec2 ; //delay 1000 to 2000
#INT_SSP
void ssp_interupt ()
{
state = i2c_isr_state();
if(state < 0x80) //Master is sending data
{
if(state == 0)
{
}
if(state == 1) //First received byte is address
{
incoming = i2c_read();
address = incoming;
}
if(state == 2) //Second received byte is data
{
incoming = i2c_read();
buffer[address] = incoming;
}
if(state == 3) //Third received byte is data
{
incoming = i2c_read();
buffer[address + 1] = incoming;
}
}
if(state == 0x80) //Master is requesting data
{
i2c_write (input(PIN_A0));
DelayUsec1 = buffer[address]*10;
DelayUsec2 = buffer[address + 1]*10;
}
}
//--------------------------------------------------------------------
void main()
{
delay_ms(200); // power up delay
setup_comparator(NC_NC_NC_NC);
setup_vref(FALSE);
set_tris_A ( 0b11111111 ); // Port A 11111111
set_tris_B ( 0b01111111 ); // Port B 01111111
set_tris_C ( 0b11111111 ); // Port C 11111111
enable_interrupts(INT_SSP);
enable_interrupts(GLOBAL);
{
//replace SERVO_CONTROLx by the chosen pin in all that follows the next 2 lines
#define SERVO_CONTROL1 pin_C0
#define SERVO_CONTROL2 pin_C1
//servo needs 1000 to 2000 microseconds - (actually about 500 to 2400 on my servo)
//the Slug sends about 100 to 200 which is multiplied by 10
do
{
output_high(SERVO_CONTROL1);
delay_us(DelayUsec1);
output_low(SERVO_CONTROL1);
output_high(SERVO_CONTROL2);
delay_us(DelayUsec2);
output_low(SERVO_CONTROL2);
delay_ms(10);
} while(TRUE);
}
}
//-------------------------------------------------------------------- |